



Ioniq
El objetivo de este proyecto es profundizar sobre las tecnologías que se utilizan en un vehículo híbrido de última generación, acercar el conocimiento adquirido a la red educativa, así como potenciar la expansión en las empresas de la CAPV en nuevos mercados del sector de la fabricación en automoción.
Gracias a la colaboración de cuatro centros de Formación Profesional en Euskadi: CIFP Don Bosco, CIFP Aretxabaleta y Egibide, un socio patrocinador, RPK, se trabaja directamente con un motor híbrido. Desde Tartanga aportamos todo el conocimiento para desarrollar una aplicación interactiva que cubra tres necesidades:
1.- La interacción del usuario con las diferentes piezas modeladas del motor.
2.- La información visual de las piezas que interaccionan entre ellas para mostrar un proceso del funcionamiento del motor.
3.- La realización de supuestos prácticos de aprendizaje.
Acercar las tecnologías de última generación aplicadas en automoción al entorno del aula y de las personas operarias de una fábrica de industria del automóvil.
Aurkezpena
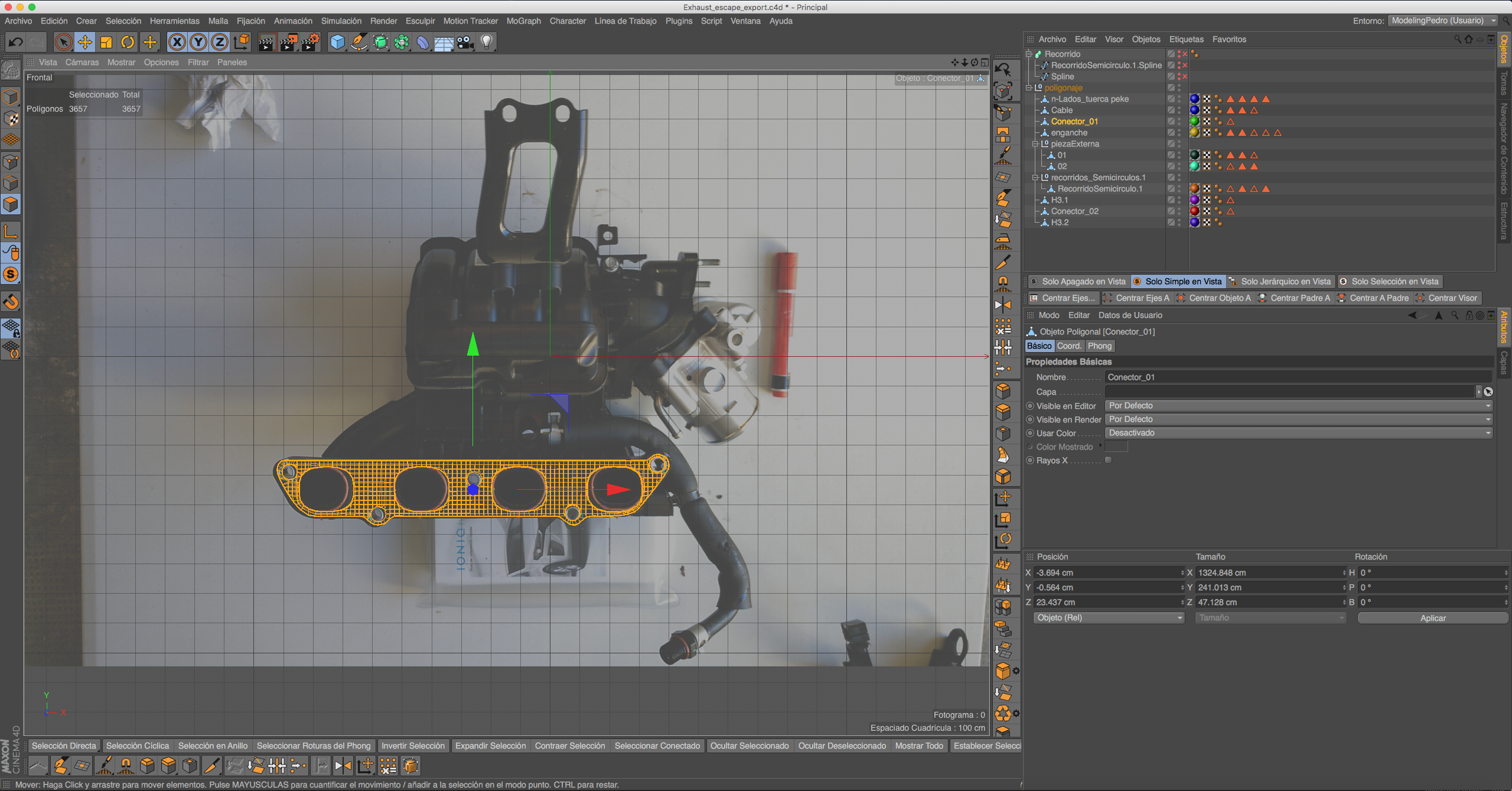
El comienzo del proceso se trata de obtener unas fotografías que nos sirvan como referencia a la hora de modelar cualquier objeto paramétrico en 3D. Por lo general, se realizan fotos desde una Vista frontal, lateral y superior. Una vez obtenidas fotografías de referencia, las incluimos como si fuesen una ‘calcomanía’ dentro del programa de modelado en este caso empleamos Cinema 4D. De esta manera el proceso será más intuitivo y eficaz.
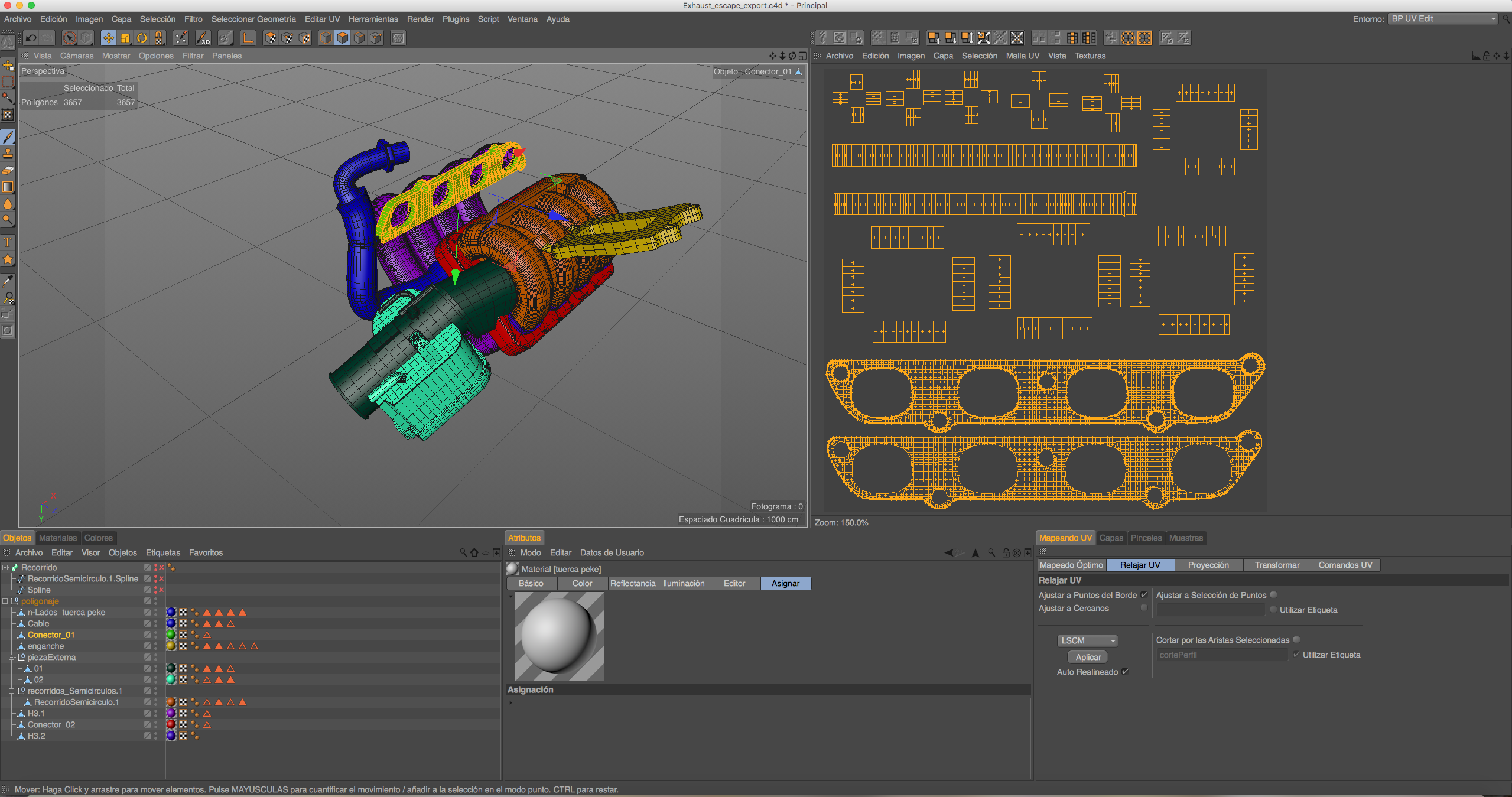
Una vez se acaba de modelar, llevamos a cabo el proceso de desplegado de UVs. Aquí la malla debe ser representada siguiendo las proporciones de la geometría en una textura 2D y de la forma más clara posible. Hay que evitar que la geometría se solape, tenga distorsiones de posición, escala o rotación. Para finalizar, exportamos la geometría con su UVs en formato .FBX.
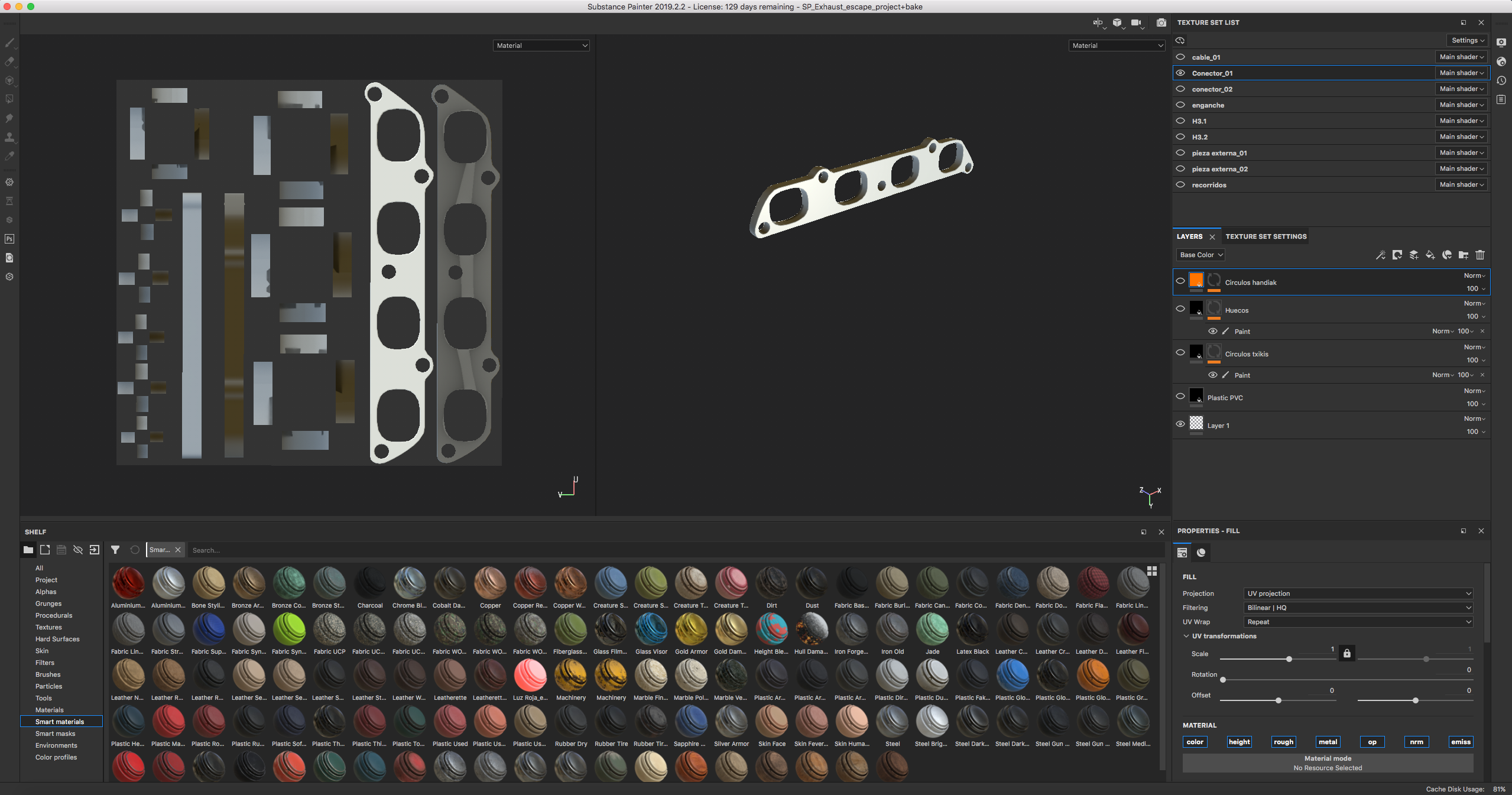
El proceso de pintado realista, en este caso, lo llevamos a cabo con Substance Painter. Se puede apreciar que el programa no tiene una referencia de la geometría en 3D, si no que representa de forma clara la textura de UVs que hemos trabajado en el proceso anterior. Por eso es tan importante realizar un buen desplegado de UVs para minimizar problemas de pintado en este proceso.
A la hora de pintar, SP dispone de una gran variedad de materiales inteligentes, procedurales, pinceles e iluminaciones para conseguir el ‘realismo’ que necesitan las piezas del motor.
Una vez pintadas las Texturas (UVs), las exportamos de acuerdo a las necesidades de configuración en Unity; Así se debe obtener los siguientes mapas de textura: Albedo, Metallic, Normal, Emission y Ambient Occlusion.
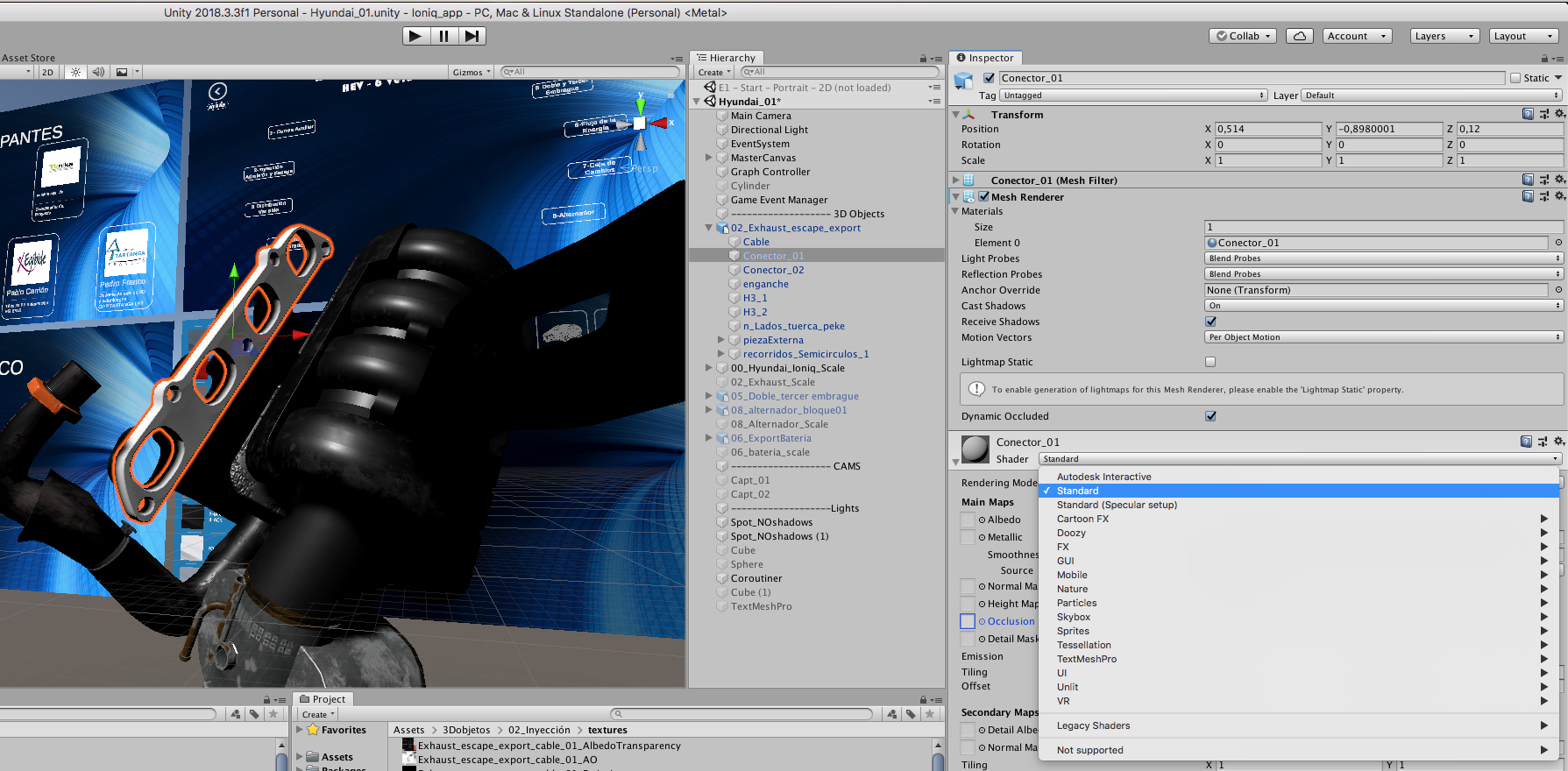
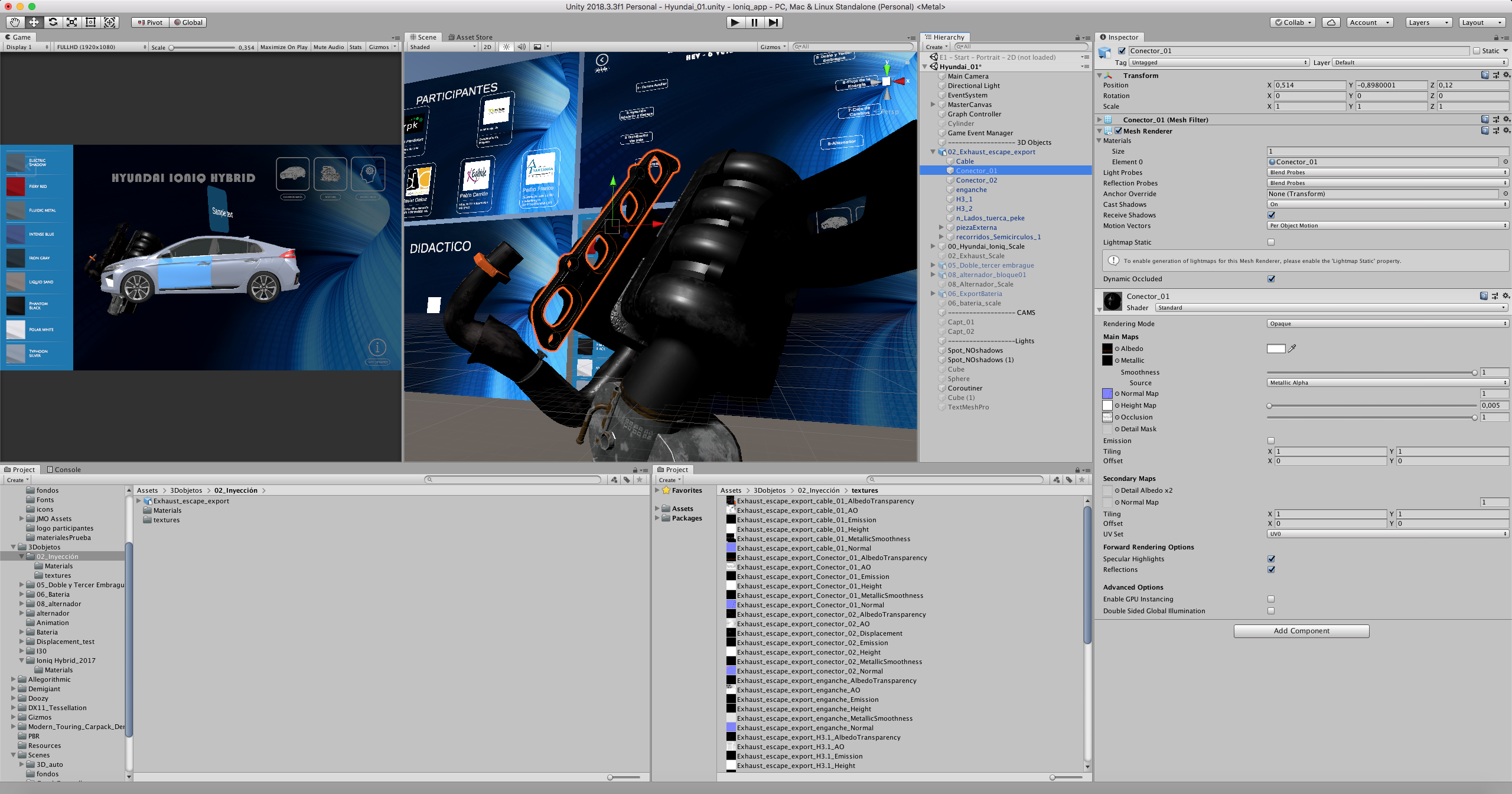
El último paso de este proceso será visualizar correctamente estas piezas ya modeladas y pintadas en una aplicación interactiva. Aquí usamos, Unity, un motor de desarrollo de videojuegos.
Se comienza importando dentro del Proyecto, primero, la geometría en 3D en FBX, y segundo, las texturas obtenidas en Substance Painter.
Las piezas se representan en el espacio 3D de Unity y en cada una de ellas se configura el Shader Standard incluyendo las texturas correspondientes: Albedo, Metallic Smoothness, Normal Map y Ambient Occlusion. El siguiente proceso es trabajar correctamente las herramientas de iluminación en Unity para conseguir el realismo que necesitamos.
- Diseño de Interface: Fondos / Pantalla Principal / Submenús / Botones. Adobe Photoshop, Illustrator y Power Point
- Script de Funcionalidad: Lenguaje de Programación - C Sharp
- Enlaces entre Menús
- Reproducción de Animaciones de las Piezas
- Reproducción de audio de fondo y efectos sonoros.
- Inserción de idiomas: Lean Localization (Unity Assets) Euskera: Txelo López París.
- Enlaces a aplicaciones externas.
- Acceso y ejecución de la Autoevaluación: Google Forms
Representación de las vistas
-

- Superior
-

- Inferior
-

- Lateral
Modelado 3D de las piezas con fotografía de fondo
Pintado realista en Substance Painter

Representación del modelado realista en Unity
Vídeo
Descargar Aplicación Interactiva
|
Partehartzaileak
Javier Oskoz
Técnico FP Automoción. CIFP Don Bosco LHII
Leire Urretxo
Técnico FP Automoción.CIFP Aretxabaleta LHII
Pablo Carrión
Técnico FP Automoción. Egibide
Pedro Franco
Profesor FP Animación 3D y Videojuegos. CIFP Tartanga LHII
Iñigo Fernández
Promotor y socio del Proyecto. RPK Scoop